The Annual Concrete Canoe Design Competition for all US Civil Engineering Students is sponsored by the American Society for Civil Engineers. Information on the competition can be found on the ASCE Website .
Students are required to create a canoe that can not only float but be raced by team members in the water. Each team must also prepare a full design report that provides structural analysis as well as hydrostatics calculations and stability analysis with crew in place. As a result each Concrete Canoe design team must obtain design and analysis software that allows them to meet the design competition requirements as well as be sure that their proposed design will be safe to paddle to victory with a crew of four aboard. Knowledge of the actual waterline and remaining freeboard above the water that will afford protection and prevent water coming aboard in wind and wild paddling battles!
Courtesy ASCE Website
Standard Mechanical Design Software that is used for both Mechanical and Civil Engineering structural design makes a lot of sense when it comes to Structural analysis for each team, but standard hydrostatics calculations are not readily available from standard CAD like AutoCAD or similar programs. But PROLINES 8 provides not only 3D NURB hull design with unlimited shape control using 3D vertex control points that are easily adjusted to refine a “Parametric Hull Design” to initially create the first canoe design by entering basic hull dimensions in addition to bow and stern shapes selected from check boxes.
PROLINES 8 Used by more than 46 University and College Civil Engineering Teams Nationwide!
PROLINES 8 has become a design standard for Civil Engineering Student Concrete Canoe Design competitions and has been in use by CE Teams for more than 25 Years. Clearly your team should strongly consider adding PROLINES 8 to your design program. Teams across the USA will be competing against others using PROLINES for their design proposals. Don’t start your design without PROLINES 8 as one of your design tools!
Consider the following Colleges and Universities that have used PROLINES for CE Canoe Design Competitions:
Alaska, Kansas, Iowa St, Michigan St, Penn St, Purdue, Tulane, Illinois, Arkansas, Cincinnati, Central Florida, Nevada Reno, Pittsburgh, Tennessee, Texas El Paso, Utah, Washington, Wisconsin, Air Force Academy, Vanderbilt and many others!
PROLINES 8 Design Software Speeds Canoe Design
Parametric Hull Design
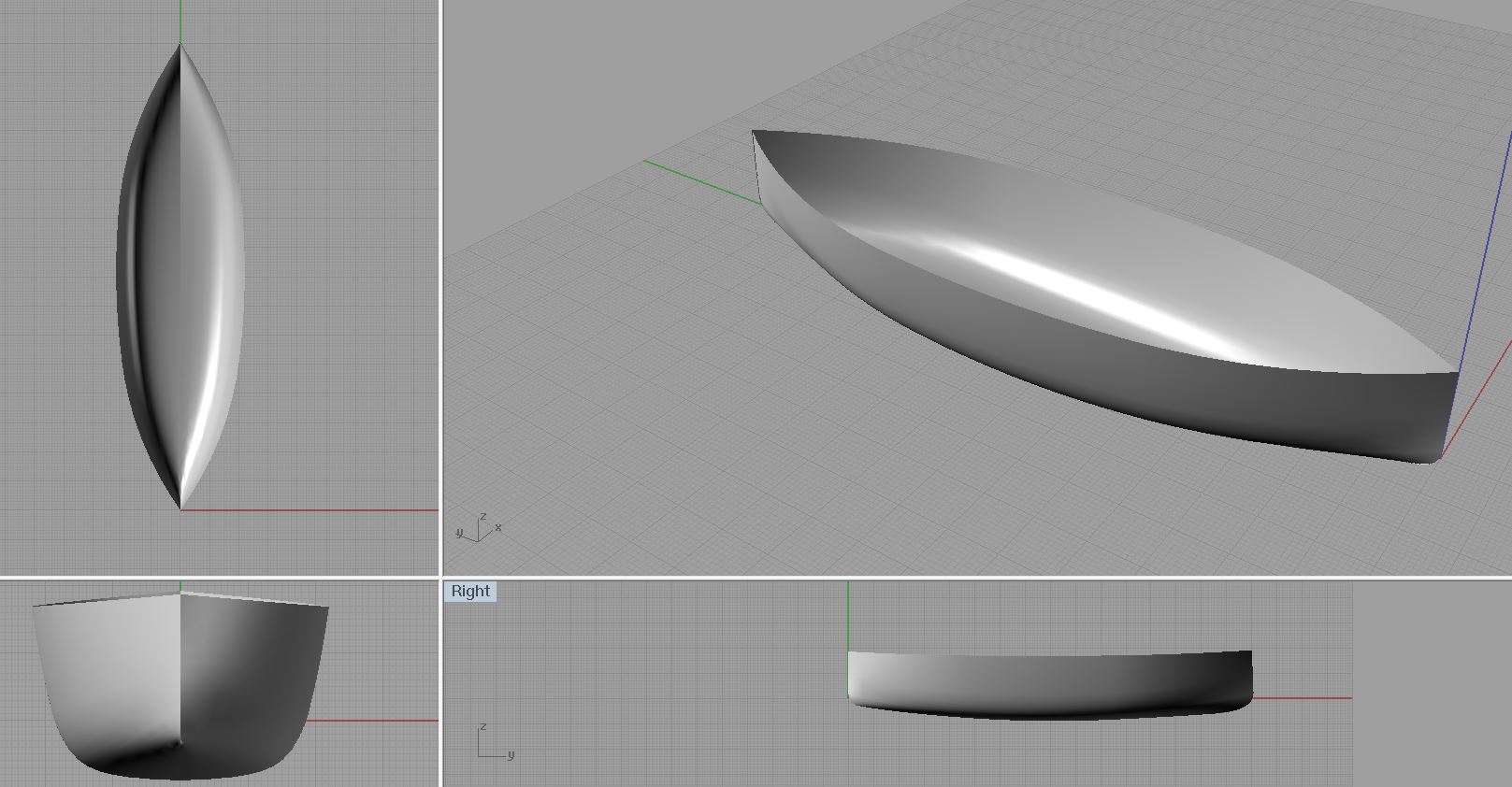
3D STL File Rendering of PROLINES 8 Canoe Design
As the hull design is adjusted it becomes critical to the CE Student Team to have a detailed understanding of three critical factors. They are:
Total Hull Surface Area – Critical to knowing the total mass of the canoe when empty and in determining the volumes of materials needed for the hull casting to determine cost of the completed canoe for the proposal.
Stability of the Canoe with and without crew aboard. Crew weights and distribution in the canoe are easily entered in the Stability Analysis “Ballast Table”. Impact of not only crew total weight but distribution of their weight in the vessel are immediately reported in fore / aft trim calculations.
True Loaded LWL is also determined in an instant by asking PROLINES to adjust the LWL to match the combined weight of the hull and crew. Remaining freeboard and true wetted surface calculations are now available. Even wave and friction drag calculation estimates are available to determine the value of hull shape changes.
PROLINES 8 Provides 3 Principal Design Planes and 3D Rotating View of the Canoe being designed
Hydrostatics Calculations Specify Mass of Canoe and Crew, Hull Surface Area and Several Stability Factors
How to Use PROLINES Hydrostatics Values for Canoe Design Trade Studies
One of the most critical real world issues the Canoe team must address is the ability of the canoe design to actually carry the required crew of 4 safely during a paddle race. The Canoe must displace sufficient water to match the combined mass of the crew and the hull itself and still have enough “freeboard” or remaining hull height above the water to prevent the canoe from swamping due to wind driven waves and splashing from spirited paddling during the race.
The Canoe Design Cycle can be imagined as follows:
A basic Canoe shape is developed based on an initial concept.
An estimate of the total Crew Weight is made
Hydrostatics Calculations are run for the initial concept and the team notes:
Computed Displacement (total weight of the boat and the crew)
Using the Total Surface Area of the Hull and an estimate of the density of the planned “concrete” mixture per square foot, calculate the weight of the hull
Verify the computed displacement is greater than or equal to the combined mass of the hull and crew
If the displacement is too low, use the calculated “Pounds Per Inch Immersion” value to determine how much deeper the hull must sink before the displacement matches the hull and crew weight.
Use the Tools Menu to “Shift the Waterline” to the desired depth and re-compute displacement
If there is not sufficient “freeboard” remaining after the waterline is moved, make hull design changes such as flattening the hull shape below the waterline to increase displacement and slightly increase the height of the canoe sides or “freeboard”
Overall strive to create a hull design shape that provides the lowest weight hull that can safely carry the crew. This will assure that the cost of the canoe in materials and labor will be minimized. The lowest weight canoe will also result in a faster boat and a chance to win the race as well as the design competition
By running the design cycle repeatedly and carefully looking at hull shape, especially nearly flat hull bottoms with gently rounded sides will result in a very high “PPI” Pounds per Inch immersion factor that will allow reduced overall hull height and weight overall. Avoid a dead flat hull bottom that will generate extra drag and make the hull exceptionally hard to paddle. A slight Vee shape is desired for directional control and reduced drag when paddling. Be sure that the desired hull shape is carried through the majority of the hull length.
PROLINES permits the design team to very rapidly close this design cycle and reduce the effort needed to create a competitive design. Values computed by PROLINES Hydrostatics and Stability Analysis functions provide extensive details for the design proposal and help assure the lowest possible cost in materials and labor.
Stability Analysis Page in PROLINES 8 Design Software
PROLINES 8 Software Benefits Summary
Creating a Concrete Canoe Design Proposal and Submittal is a significant task. Students must have an excellent grasp of what the Canoe Design means in terms of materials and labor cost to build the canoe. The most “weight efficient” hull design will carry the weight of the crew with the lowest possible weight of the canoe hull. Not only will the lowest possible weight canoe be “weight efficient” but the lowest total mass design will be among the fastest designs on the water during the race.
PROLINES “Parametric Hull Design” offers rapid initial start to the design phase. Hull shape changes can be accomplished by simple movements of shape control vertices or overall hull changes in beam, length or draft are instantly made using the TOOLS and EDIT Menus. Saving incremental designs with serialized names will allow the team to compare design concepts by opening the various designs and choosing a most likely winner.
Standard CAD tools may offer the ability to generate a canoe hull shape but PROLINES provides integrated Analysis tools that instantly imply the viability of the design.
Once the design is complete, PROLINES 8 Student PRO edition provides 3D CAD files that permit 3D Rendering, 3D Printing, 3D Structural Analysis. For teams that are cash strapped, Vacanti Yacht Design LLC will provide one set of 3D CAD files for PROLINES 8 BASIC users at no charge to the team.
Starting in the summer of 2022, and growing rapidly in the summer of 2023, we observed a large number of boats cruising the San Juan Islands of the Washington State and Gulf Islands, Broughtons and the Inside Passage to Alaska carrying various installations of Starlink Mobile and a few Starlink High Performance antennas aboard both Sail and Power boats. On the water experience led to many reports of excellent Internet access and WIFI calling capability all the way to Ketchikan, AK. While technically the waters of Washington and Southern British Columbia (along Eastern Vancouver Island) are notionally “protected” and are not directly exposed to the Eastern Pacific Ocean, they can nonetheless become hazardous with open fetches of 150Nmi and widths of more than 20Nmi in many places. High mountains fjords offer spectacular vistas but also create significant weather conditions. Certainly anyone venturing North of Cape Caution at the Northern end of Vancouver Island would be exposed to the Eastern Pacific at several locations on the way to Prince Rupert BC, Ketchikan AK and finally Juneau AK and would require timely weather and sea condition reports. Cellular coverage is very sparse approaching the Northern end of Vancouver Island and cannot be relied upon for collection of weather data, sea conditions or cell phone calling.
As a result there has long been a need to provide some form of internet service in these remote locations, preferably by Satellite so as to solve the massive infrastructure problem of locating hundreds of miles of remote cell towers along the BC and AK coasts.
The first generation mobile version of Starlink, initially reserved for parked RV’s, was later licensed for operation in motion at slow speeds (below 10Kts) using the 2022/23 “Standard Mobile” mechanically actuated antenna. It was later joined by the “High Performance” flat mounted Starlink antenna designed for in motion operation on high speed vessels. Both of these antenna systems proved to be a huge benefit to boaters of every walk of life by providing precisely the needed connectivity for exploring these fabulous cruising areas with safety via continuous phone coverage using WIFI calling and weather data for critical cruising plans in these very remote areas. These two critical functions were also accompanied by creature comforts like streaming favorite movies and high speed email access.
A “New Standard” Antenna Released
In December of 2023, Starlink announced the release of a “New Standard” Mobile antenna that no longer used motors to tilt and scan the entire Starlink antenna to follow overheard Low Earth Orbit (LEO) satellites that passed overhead. This “New Standard” antenna has a simple plastic “Kick Stand” that tips the antenna up about 11 degrees but otherwise has no mounting pole and no motors inside the antenna structure. I read many RV / Boating Blogs and viewed many YouTube videos that described all manner of “hacks” to get a Starlink “Mobile” antenna installed without the motors activated and without the OEM mounting pole. These hacks even involved using CNC machines or hand held Dremel Routers to cut off the back of the antenna or drill large holes at precisely the right place and disconnect the motor DC power and control lines. Any of these physical changes immediately invalidated the Starlink warranty and involved the potential for moisture or water to directly enter the antenna system and damage or destroy it.
Simplified Installation and Better WIFI
The New Standard antenna not only solves all of the antenna complexity issues, it comes with a fantastic WIFI 6 router that sports two Ethernet Cable connections and a separate Power Supply module that makes installation far easier than anything seen on the web for the “Standard Actuated Antenna”.
The old Mobile Antenna is now called the “Standard Actuated Antenna” and the new antenna without motors or mounting pole is now dubbed the “New Standard Antenna”. Anyone intending to purchase a new Mobile Starlink antenna should be aware of the large differences between the two and make sure they are acquiring the “New Standard Antenna” because it allows direct flat mounting on the roof of a pilothouse or coach roof with the simple one handed pinch and pull removal of the “kick stand” and then manufacturing simple mounting blocks that can capture the corners of the new antenna. There is no doubt that clever companies will soon sell flat mounting kits for this New Standard antenna.
The other issue associated with installing and using a Starlink antenna aboard a vessel is the supply of power to the unit. The “New Standard” antenna requires on the order of 100W of 120V AC power on startup and on a transient basis when in motion. Power requirements drop to 50-60W of quiescent power for fixed operation. At 120VAC this amounts to 0.5 – 1 Amp of power but at 12VDC this amounts to 9 amps input to an Inverter. While operation underway could easily be accomplished by most Inverters using engine alternator input, once the vessel is at anchor, power transitions to batteries at 12-24VDC. Thus it becomes necessary to provide an Inverter capable of at least 100W and preferably double that to avoid operation of the inverter at near maximum capability over long periods of time. We have seen still more “hacks” by DIY folks on the web to replace the older combined Starlink WIFI Router / Power Supply but the cost of the components required is very high and the complexity of cutting OEM cables and rewiring them for Ethernet Data and DC to DC converters is usually beyond many DIYers capabilities.
Happily the New Standard Antenna comes with a separate high performance WIFI 6 Router complete with two Ethernet ports to connect to onboard hardwired systems and a separate 120VAC power supply that can be located as needed. As a result of all of these changes, all a boater needs to install this new version of Starlink Mobile antenna is the courage to drill a hole for the Ethernet cable (9/16″ Diameter) and configure some simple “stand offs” at each corner of the antenna. The cable access hole must be sealed using a typical cable gland but otherwise one is looking at a total of 5 holes topsides to mount the antenna. Alternately, if flat space is not sufficient, the standard “house mount” intended for wall mounting affords an easy way to mount the antenna on the side of a mast or dry stack mast system on larger vessels. Mounting the new WIFI 6 router can be as simple as placing it on a chart table or desk and the power supply can be hidden away if necessary.
In our case I opted for a hidden installation of the WIFI 6 router and power supply and using a 250W dedicated inverter with remote On/Off control above the headliner in our pilothouse. Each installation will be a bit different but essentially there is no longer any need to modify the Starlink equipment and the only addition is the consideration of a dedicated Inverter ($150 by Victron) so that the vessels large 2000 – 3000 Watt inverter is not being toggled on an off (along with all appliances it may power) to save battery power when the Starlink system is not needed.
Please see the attached PDF file for more information and detailed photos
Benefits and Shortfalls of AIS for Recreational Boaters
Boaters tend to regard AIS as a source of absolutely correct and valid information that they can rely on to provide them with data regarding approaching and overtaking vessels. But the fact is that AIS data can be erroneous and it can lack critical details about vessels that may pose a hazard to them.
Lets give at least two specific examples about AIS data that may be surprising. The first example is AIS data from a tug with a tow. The AIS reported position is at the location of the tug and does not depict the fact that a tow is following several hundred feet behind and that the length of the towed barge is not presented on the MFD. Thus if a boater were in bad weather or cruising at night with a tug and tow crossing perpendicular to the path of the cruising boat. If that boater follows a path that is immediately aft of the tug and does not see the trailing barge the mistake could be fatal when the cruiser hits the huge tow hawser just underwater.
The second example is when AIS data for direction, speed or location are erroneous. This author has witnessed several vessels that were traveling in directions nearly 180 degrees from the true course / heading of the vessel. The error arises when the AIS transponder uses a Heading or Course data source that has not been calibrated or validated at the time of the AIS transponder installation. This can occur because you cannot see your own AIS ICON on your own chart plotter or MFD. It requires a separate boat that has AIS receive capability to verify that the reported heading /course over ground is correct. This author has witnessed even County Sheriff Patrol boats transmitting wildly inaccurate heading or course data as shown in the image below.
Erroneous AIS Data Showing the vessel ahead approaching our Port Bow – In fact it was headed away from us at 15 – 20 Kts. Note that the AIS Target would have gone aground had it been following the plotted direction! Magenta color spots are radar returns from Raymarine Cyclone PRO Radar.
In the first example the AIS broadcast is valid and is not misleading in terms of the tug itself. But your MFD / chart plotter will not show an extended target that properly indicates the full nature of the threat. In the case of large ferries and other ships, the chart plotter or MFD usually reports a special AIS vessel icon that implies a ship or other large vessel is present. But there is no display of a hybrid vessel that consists of two vessels – one powered and the other towed. The only way to know that you are crossing paths with both a tug and tow is to either physically see the vessels or to observe them via radar.
In the second case one must be lucky to visually observe that the transmitted heading / course over ground data vector (usually a line with an arrow that is 3-6 minutes long at the vessel reported speed) does not fall anywhere along the actual periodic GNSS position updates that are reported by the vessel transponder. This is very hard to detect happening when there is a busy waterway involved. A skipper assumes the plotted direction vector data is correct and plans his course accordingly. The only way to detect the AIS course data is in error is to observe the vessel on radar and being using “trails” or MARPA / ARPA target vector data that is independently measured by the radar itself.
It is an interesting thing to observe that if an ownship course or heading data is in error then radar observations of other vessels will also show incorrect course data of EVERY other vessel that is being reported by the radar. Now one would hope that an error this large would be easily detected and corrected by the vessel owner.
Using only AIS Receive
Vessels equipped with no radar and AIS receive only are certainly ahead of the game when compared with a vessel with neither capability. AIS receive equipped vessels have the benefit of seeing other threats around them and certainly this dramatically improves their chances of safe travel at night or in poor visibility conditions.
These vessels can receive emergency man over board or other vessel emergencies in order to render assistance or to steer clear of a critical situation. They can also observe special Aids to Navigation (ATN), buoys or markers that physically are not present as anchored buoys or day marks but exist only as a mark that is present only on an AIS equipped vessel.
Thus the vessel equipped with AIS receive only has gained several advantages but it is not broadcasting its own presence to other vessels. Therefore this vessel must assume other vessels may not be observing them visually or on radar and must choose to navigation to avoid collision without interaction with other vessels or by contacting other vessels on VHF radio on 16 or other Vessel Traffic System channel to avoid a hazardous crossing.
The great value of AIS is in poor visibility conditions. So the AIS receive only vessel is burdened with making sure they have been observed when crossing with other vessels. Certainly they are far better off than a vessel with no AIS and no Radar but they do have some handicap.
In the image below one can see radar returns painted in magenta (purple) for the nearby islands and a nearby AIS icon for a vessel passing well to starboard aft of the Own Ship Icon. The image shows that the actual position of the AIS target is in front of the current location. This reflects the delay in transmitting position for high speed vessels. Just to the right and below of the AIS target is another Radar target on a second vessel that is not carrying AIS. While this radar target for the second vessel shows it poses no problems for the Own Ship vessel it does point out that AIS does not report everything on the water.
By only carrying AIS receive and not using Radar a vessel still cannot detect other recreational vessels that are not equipped with an AIS transponder. This suggests that a vessel without radar and only AIS receive will be at risk in poor visibility conditions and should avoid being underway in such conditions. Certainly this is not too great a limitation in fine summer boating weather on salt water or small inland lakes where pontoon boats do not carry AIS transponders!
Low Cost AIS Protection
AIS is a great asset for safety and general situational awareness on board most recreational vessels. Given that there are now VHF communications radios that provide built in GPS receiver, AIS receive and even an AIS target display and target list even small boats can easily afford to have AIS monitoring capability even if they do not have a Chart Plotter or MFD installed. For vessels that do have a chart plotter or MFD installed these same VHF radios with built in AIS receive can provide AIS data to the Chart plotter or MFD via NMEA 2000 or NMEA 0183 High Speed data.
AIS receive capability is a tremendous help to displacement or semi-displacement vessels like sailboats and trawlers that travel at relatively slow speeds and therefore have limited ability to make meaningful course changes in the event of a close encounter with a high speed vessel like a ferry (330+ ft and 17+Kts in Pacific NW of USA) or standard shipping that can be 1000ft and traveling close to 20+kts.
If a small slow vessel does not carry Radar, the least expensive alternative to provide the most cost effective collision avoidance is a modest VHF Communications radio with AIS receive and display built in. These systems typically sell for under $500 and offer emergency distress calling when registered with an MMSI number in addition to providing AIS information. Examples are the Standard Horizon GX2400 and GX6000 that both retail for under $500 (The GPS Store prices May, 2022).
In congested waterways like the beautiful San Juan Islands of Washington State and The Gulf Islands of Canadian British Columbia AIS is a huge help in detecting the many ferries, ships and tugs that ply these waters. Being able to know that there is a high speed ferry approaching from behind an island is a great asset indeed! Being caught in summer time fog in these channels not only poses a navigation hazard but is a real threat when commercial ferries traveling close to 20Kts can be expected at any time.
Adding Marine Radar to Compliment AIS at Sea
In the image below we highlight a busy water way in the San Juan Islands of Washington State in the US. In this image the tow tug Island Mist AIS Icon can be seen with a radar detection that follows the AIS Icon. This is a direct indication that there is a TOW barge present that does not have a corresponding AIS Icon. While it appears that the Radar return (red blob) is very close to the reported AIS Icon, note that the image scale shows 1 Nmi is about 1/2″ on the display! So the red radar image is actually a long way aft of the reported AIS Icon for Island Mist at this scale. Zooming on the chart plotter would readily show the actual separation distance.
You can also notice that the “Own Ship” Vessel Icon in the center of the image is being followed close behind by an AIS Icon from another trawler and intends to pass to Starboard. At this range the radar return for the very close vessel may have been suppressed but would appear when zoomed in to shorter range for tactical information.
Radar Limitations
In the image above we notice that there is a large AIS target (designated as shipping by the AIS Icon type) just to the right of Island Mist. There is no radar detection of this vessel because it is just behind the high point of Cypress Island. The island is blocking the direct illumination of the vessel by the radar. This shows that while AIS signals can leapfrog over most nearby land masses radar cannot “see around corners”.
If you look closely at this image you will note that there appears to be a number areas that are missing radar detections, such as the left side of Guemes Island and no detections of Sinclair Island. In all of these cases the issue is “radar shadowing”. If the radar does not have a direct line of sight to the object because of a large object in the foreground the radar cannot see that target.
AIS can receive signals that are behind many (not all) other land masses because it does not depend on illuminating the target with a transmitted signal. But it can receive a signal that is either refracted (bent) or bounced from other land masses to the AIS receiver. These bounced or bent signals may flicker or come and go as the own ship changes position but they are at least observable part of the time.
Another significant problem for radar is angular resolution of multiple closely spaced targets. When it comes to radar systems, size does matter. A small radome radar that encloses a hidden rotating antenna that is barely 18″ across will produce a very wide beamwidth that can be as much as 6.5 degrees wide. Consider that at 3000ft (1/2 Nmi) a 6.5 degree radar beam will be 331ft wide! Clearly a couple of 100ft long boats could be within 100ft of each other and so far as the small radar is concerned there is just ONE vessel present because it cannot measure less than 331ft.
A 6ft long open array on the other hand will have a 1.2 degree beamwidth and can resolve 61ft of separation between targets. It will clearly show the two 100ft vessels placed 100ft apart and report them as both being present.
Finally the most challenging conditions for a radar system are very heavy seas or very heavy rain conditions. In these conditions waves themselves generate radar reflections that directly compete with the reflections from small vessels. Attempting to attenuate “sea clutter” or reflections from wave tops can also eliminate detection of small vessels in the same wave structure.
Rain can pose a similar problem when it is very heavy (1 – 2″ inches per hour – a very heavy storm by any measure) by generating large areas of “volume detections” – meaning that rain can fill the entire 22Degrees of vertical extent and say 1.2 degrees of azimuth extent with rain that is readily detected. This competing “rain clutter” can be attenuated but it will also cause small targets in the same area as the rain to be eliminated as well. Heavy rain (>1″ an hour) will also directly attenuate the radar signals themselves on both the transmit and receive paths.
While attenuation of typical X Band Marine Radar signals is virtually hill in heavy fog conditions, heavy rain poses a threat of total loss of visibility and attenuation of radar detections as well. When combined with heavy seas and wind, heavy rain conditions pose the most threatening conditions on the water so far as collision avoidance is concerned. Commercial shipping carry C Band radars that employ very large antennas of 6 -12 feet so that under heavy rain and wind conditions they can still maintain radar visibility. C Band radar incurs much lower attenuation of radar signals and can penetrate rain with less rain reflectivity. But C Band radars operate at 3 GHz and will require antennas that are on the order of 2- 3 times larger than a standard X band antenna to achieve the same angular resolution. Carrying a 12f – 18ft open array antenna on recreational vessels is totally impractical and is reserved only for large ships for that reason.
Many older sailboats are still being actively raced and cruised by families that love their vessels but wish they had some performance improvements that would possibly make the sailing experience a bit more exciting, safer or perhaps more competitive. I have had many requests for changes to vessels over the years and each one is a unique case.
Design Result Update
We are really pleased to report that the C&C 35 was raced in the 2021 Trans Superior Yacht Race and took 1st Place in Class and placed 10th Overall on corrected time. The owner supplied an excellent presentation that shows the manufacturing methods he used and the results of the race, including crew comments on how the boat behaved with the new rudder. There was significant experience with this boat on similar races with the old rudder so the crew were able to comment with good knowledge of past and present performance.
So far as Vacanti Yacht Design LLC is concerned the most telling comments relate to what the crew described as the elimination of “weather helm” and not needing to “chase the sail” downwind. The specific “Fish Tail” foil shape we designed was specifically created to provide exceptionally large “stall angles”, that angle where lift coefficient suddenly drops to an intermediate value from near max lift and cuts overall lift (steering force) in half or more. The “fishtail” design does not stall until well beyond 20 degrees. This means the rudder will continue to provide control authority even at extreme angles of attack without adding a large step in drag as would otherwise commonly occur.
The planform shape was also designed to reduce the apparent sweep back angle of the mid chord line, especially near the lower 1/3 of the rudder span. The very highly swept and rounded leading edge of the original rudder design caused some serious problems with performance. The highly swept tip of the original led to the weather helm and loss of speed (drag increase as the rudder acted as a brake not a lifting surface. What really happens in a planform like the original is that the very short chord lengths result in very low Reynolds numbers for that region of the rudder. It is also likely that the very short chord lengths in that area are not true foil shapes but are simply cut off sections of the main foil shape so that there is no proper leading edge and transition shape present. This leads to a lot of problems with high drag flow over the planform.
The high sweep back angle of the leading edge makes it worse because it induces span-wise flow down the rudder from the root to tip. Transport Aircraft use sweep back to reduce apparent airflow speed via span-wise flow to avoid developing super sonic shock waves and exceptionally high drag. Sweep in keel and rudder design is useless really and is only used in moderation to achieve a desired taper from root to chord. Rarely is more than10 – 15 degrees of leading edge sweep back ever justified in keel or rudder design.
Vacanti Yacht Design LLC was prevented from completely changing the leading edge sweep back angle because it would have required massive structural hull design changes to implement a vertical rudder stock. So the design was done in a manner to reduce the impact of the sweep back to the largest extent possible. The near vertical trailing edge at the bottom of the rudder causes the location of the mid chord line to become more nearly vertical in this region.
The owner, Dan Larson commented on the addition of 6″ near the root chord – he is referring to the region between the hull and the top of the rudder aft of the rudder post. The water flow this far aft on the hull is not laminar and will be turbulent especially at hull speed (1.34*Sqrt(LWL in feet)). For the section of the rudder above the rudder post and up to the hull there is no leading edge section of the foil shape. Thus it is not clear how the turbulent flow along the hull and the rudder will interact. Apparently this resulted in cavitation (vibration reported by the crew) – which is the formation of air bubbles as flow separates from the hull or the rudder. The crew comments suggest the bubbles formed just against the hull. This problem has occurred because the huge leading edge sweep back angle created the gap in the first place. Modern hull designs with more nearly flat aft sections and nearly vertical rudder stocks will not have this issue.
Here now continues the original design methodology narrative….
It is very important however to understand that making structural changes to the keel or rudder is not a low cost project and it can be time consuming to complete. Making small changes such as accurately fairing a keel or rudder so that the foil shapes (running chordwise along the length of the keel or rudder) accurately reflect a well known NACA shape or at least so that the foil shape is symmetric on both sides can have some benefit and be a much lower cost project. Making small changes like fairing can be very valuable if the basic planform (outline shape of the keel or rudder) is fairly efficient design as built. Many times, rudders or keels that are very heavily swept back, have very odd tapers (root chord versus tip chord lengths), heavily curved edges and other deformations cannot be sufficiently improved by just making the foil shapes more accurate or symmetric. These keels and rudders can’t be improved without replacement.
Recently I was asked to redesign a rudder for a well loved C&C 35 that was still being raced on the Great Lakes. Because the owner had access to CNC machinery (Computer Numerically Controlled milling machines) an all new planform and foil shape was possible. The existing C&C 35 rudder was a heavily stylized 70’s design that had some serious defects such that no amount of fairing changes would be useful. Given these two factors a new design was deemed reasonable.
The owner required that the existing swept back rudder stock be re-used for the new rudder. This posed a serious challenge for trying to improve the Lift / Drag performance by more than just changing out the foil shapes.
Original Design
The original rudder design shown above was also installed at a 25 degree sweep back angle built into the rudder stock. It would require major structural changes to the boat to revise that aspect of the rudder design, so it was necessary to look for an alternative that would potentially reduce the impact of the sweep back angle.
The design above actually only has a very small central region where the the leading or trailing edges are not massively swept or tapered. The upper end of the rudder also has a very large aperture that made a large gap between the hull and the rudder top, causing loss of efficiency. The sweep back of the rudder stock that parallels the leading edge of the rudder caused the sweep of the leading edge in the lower third of the rudder to take an even more severe sweep angle relative to the water flow. Heavy sweep back angles result in loss in “Lift Curve Slope” (LCS) and increase in induced vortex drag. It can also result in the rudder stalling (loss of lift) at just modest angles of attack. This can be a serious safety concern when sailing off the wind, especially reaching under spinnaker or large Genoa headsail. “Round Ups” caused by heavy wind gusts can result in a broach if the rudder does not have sufficient control authority to keep the keel under the vessel.
Reduction in LCS means the rudder has to be steered to larger angles of attack to achieve the same lift or steering force that could have been achieved by a more efficient planform. This can mean the rudder stalls or generates high levels of drag under normal steering conditions.
After some consideration I arrived at the rudder design shown above. The drawing shows a heavy red line that represents the “Quarter Chord” of the planform. The sweep back angle of the Quarter Chord determines the LCS (Lift Curve Slope) of the planform. You can see that despite the required 25 degree sweep back angle of the leading edge, I was able to cause the sweep of the lower third of the rudder quarter chord to be reduced by at least 5 degrees by tapering the trailing edge of the rudder in this area.
The trailing edge taper has the effect of increasing the aspect ratio (ratio of rudder Span to Average Chord Length), reduce wetted surface, reduce lifting forces at the tip of the rudder and as a result reduce vortex drag.
New Rudder Design Rendered Using WINGS 10 STL file
The new planform design shown above will be created by CNC machining a new female mold and laying up glass mat and high density, closed cell foam. An interesting video that shows this process can be seen here: https://www.youtube.com/watch?v=HqBXDuI5NzY
Actual Rudder During Build Phase
In addition to the planform changes, it was very important to choose a foil shape. Let me rant for a moment regarding the tendency in sailing circles to misuse the the term “foil”. “Foil” does not refer to the outline shape despite the new AC 75 boats being called “Foilers” or when they sail to be called “Foiling” or being “on foil” etc!! An airplane does not “foil”, it flies on a WING. Not a foil! A FOIL shape is the specific NACA or Custom design shape the rudder or keel in the chord (fore and aft) direction. This shape is critical to lift, drag and stall characteristics of the overall planform – the outline shape of the wing or rudder or keel.
Simple examples of popular rudder FOIL shapes are NACA -0010 or 0012 as are cataloged in various books and online. Normally this is a good conservative foil shape to choose when compared with the more typical “low drag” laminar flow sections known as 63-010 or the higher 64, 65 or even 66 series foil shapes. These “60” series foil shapes have a definite place in keel design but are rarely good choices for rudders. Please look at my other papers to see explanations for why this is the case.
Lift Coefficient Vs Angle of Attack (Rudder Angle) for NACA 0010
NACA 0010 Foil Shape
The plot above shows the lift characteristics of the standard NACA 0010 rudder foil shape as a function of rudder angle. It is very clear that at angles above 9 degrees that the foil shape suffers a huge 60% reduction in lift that never recovered, even at angles as high as 20 degrees. Drag is also very high under these high steering angles so that the rudder becomes a brake rather than a steering function.
Custom Foil shape
Custom Foil Design
The new customized foil shape shown above takes its concept from a class of rudder foils known as “Fishtail” shapes. This type of foil and rudders that use “fishtail” foil shapes can be found in internet searches.
This particular variant of the “fishtail shape” was chosen for strength of the rudder and ease of manufacture. It was also chosen for its very graceful degradation of lift as can be seen in the plot above. Now it can be seen that at rudder angles above 10 degrees the rudder will continue to develop lift and will not have the dramatic loss of lift experienced with the NACA 0010 series at angles above 10 degrees. This will provide the owner with a substantial margin of safety when sailing on the Great Lakes in heavy conditions.
True “fishtail” foil shapes have been shown to achieve exceptionally high levels of lift coefficient without stalling and exhibit a very high foil shape “Lift Curve Slope”. But these shapes can have some serious mechanical structure issues at the trailing edge and are challenging to actually implement. Never the less they are used extensively on ships, tug boats and work vessels that require exceptional maneuvering capabilities with very large steering angles and must have very responsive helms at even low steering angles.
Despite these high lift features the new custom foil shape shown above has an exceptionally wide Drag bucket” or region of low drag coefficients that do not change rapidly with steering angle.
Summary
Despite all appearances, the new rudder design has virtually identical surface area to the original design. The more consistent chord lengths of the new design will keep the vast majority of the rudder in the same Reynolds number range (operating conditions) versus the original design with a very large variation in chord lengths that resulted in a huge range of Reynolds numbers. Small chords operate at low Reynolds numbers and result in highly degraded performance relative to the longer chords. Also the very short chords are typically never properly implemented and are achieved by simplistic fairing and smoothing “by eye”. This rarely results in good behaviors.
We expect that the CNC machined mold for the new rudder will result in high accuracy implementation of the foil shape and the new rudder planform will dramatically improve steering response and offer better “feel” in heavy round up conditions that are far less likely to result in a broach caused by loss of control (lift) at the rudder due to the old planform shape and the new foil shape. Drag will be reduced because the rudder will deliver the needed turning forces at small rudder angles. Smaller and less frequent movements of the rudder will result with an overall reduction in drag due to dynamic conditions.
Back in 2007/8 I was employed by Honeywell Aerospace in Redmond Washington and was working on solid state pulse compression weather radars for aviation. The newly developed RDR 4000 (and now the RDR 7000) had just hit the market. It was the first replacement of the original simple pulse modulated solid state radars (replacing Magnetron tube transmitters with transistor based transmitters) with a pulse compression waveform (FM Chirp on top of a pulse waveform). This technology pre-dated the first of the commercially available solid state marine radars by several years. In 2008 we installed the Transmit Receive module of the RDR 4000 in the base unit of a 6 foot open array antenna and installed it on a 43Ft North Pacific Yachts Trawler. We took that radar out on the waters near Anacortes, WA (USA) and collected images of marine targets and in various wind conditions. This was the first time a solid state pulse compression radar had been demonstrated as a Recreational or Commercial Marine Radar.
Notice of those test results and some images were presented publicly in Seattle at a Maritime Navigation conference and published on the Panbo Marine Electronics blog – https://mt.panbo.com/2008/11/honeywell_pc_ss_radar_wow_again.html. That was the beginning of what is now accepted as common place Marine Radar technology for both Recreational and Commercial applications. Major manufacturers Raymarine, Garmin, Furuno and Navico all sell very good Solid State Pulse Compression radar systems. At the time of this writing Garmin had just announced its new 250W peak Solid State Marine radar with performance rivaling 4KW and 12Kw Magnetron based radars of old.
An example of the 40 Watt Honeywell Marine Radar images compared with Magnetron systems in 2008: Honeywell data on Left in the combined image taken in Guemes Channel just North of Fidalgo Island in Washington State.
Now that solid state pulse compression systems have been perfected and are being introduced in ever high power and more capable systems by competitors, where is the next form of Marine Radar Technology going to come from?
I propose that the next generation of Marine Radar will be a low cost Phased Array Radar with electronic beam steering in AZ only and multiple beams generated in the EL dimension. Traditionally Marine Radars have a fixed elevation beamwidth of 22 degrees that is designed to keep the sea surface in view as a function of boat motion. It is also useful to provide long range detection of rain squalls to provide some level of protection from thunderstorms and microbursts that can create exceptionally dangerous conditions in relatively small areas that are to be avoided. This 22 degrees of elevation could be broken into multiple contiguous beams to provide detailed elevation information. I further propose that while a single panel phased array system would normally be limited to about 90 to 100 degree field of regard in AZ, this array could be rotated 360 degrees as current traditional systems are done. While this 360 degree mechanical rotation of an AZ scanning radar may seem redundant note that the AZ scan is exceptionally fast electronic steering that permits revisiting of tracked targets during a single scan and for multiple AZ scans of the same area during a single mechanical rotation. The potential for vastly improved target detection probabilities is obvious.
So where will this low cost phased array radar technology come from? I propose that it can be found both in at least two of my patents (9,897,695 and 10,775,498) and others in my name and assigned to Honeywell. A current radar being flight tested and ground tested at Honeywell is known as the IntuVue RDR 84K. A brief video of the radar can be found here: https://youtu.be/MT0zWKzNV14
Where previous Phased Array Radar technology has been exceptionally expensive ( think millions of dollars) the small solid state systems that are possible today at K band (24GHz) and X Band (8 – 10 GHz) using digital beam steering rather than microwave phase shifters is on the order of thousands of dollars and rivals the cost of the most recent Garmin 250W mechanically scanned marine radars.
The potential of electronic beam steering in AZ when combined with multiple elevation beams would be unrivaled for marine radar applications. Consider an 8″ wide array (RDR 84K is 8″ x 4″) that can produce an 8 degree beamwidth in AZ and EL planes with the potential to subresolve that down to 0.8 degrees or better. A small system like this would be of tremendous value to the Washington State Ferry System that daily has to thread the needle among small pleasure boats that do not carry AIS transponders and that cannot be seen by standard radar systems at short (<1Nmi) when mounted some 50 – 75ft above the waterline. One or two small phased array systems similar to the RDR 84K could be mounted near the car deck level and provide exceptional images at ranges of 1Nmi with no mechanical scanning. The radars could also supplement visual systems for approaches to terminals in poor visibility conditions.
Similarly small recreational vessels like sailboats that cannot use anything larger than a 24″ radome base radar on the mast would see tremendous benefit in the imaging capabilities of a mechanically scanned phased array radar.
The technically savvy person may also immediately wonder about the applicability of the new Automotive Collision avoidance radars. But these systems operate at 80GHz and are intended to provide no more than about 300 meters of detection range. Hardly enough to provide sufficient warning about an approaching threat that is 1Nmi or more away and traveling at 20 Kts without AIS transmissions. Automotive radars are highly specialized to their application and would require considerable modification to provide any value in a marine environment.
There are other possible adaptations of the patented technology that is presented here that can be considered for a very low cost multiple beam mechanically scanned array with imaging capabilities but lacking multiple revisit features during a single mechanical rotation. None the less this could afford excellent radar performance for the tens of thousands of small fishing boats in the range below 30ft that currently blast along at 30 kts come fog or not without any collision avoidance capability beyond a chart plotter with AIS. Given the large number of non-AIS targets that can be present in littoral regions all over the world, it would seem this could be a large untapped market for Radar technology that currently is not served.
While I am the inventor of record, these patents are the property of Honeywell. The patents are available in the public domain and are presented here as such. Vacanti Yacht Design LLC does not represent that it has any ability to field these systems in the proposed applications but as the inventor I find the potential for their use to be obvious and are news worthy in that regard. I suggest any interested party contact Honeywell directly using the contact information provided with the Video and Website for the RDR84K. VYD LLC has not been paid for this article in any way and the article is the creation of the inventor of record solely for the interest of patrons of my website. I am available for consultation on matters of radar design and development as Vacanti Consulting Services LLC.
I have worked in radar technology for over 44 years in application to military missiles, radar altimeters, aviation weather radar and small phased array systems for drone collision avoidance, mapping radar Altimeters and brown out landing aids for helicopters.
I’ve watched as recreational and commercial marine radars transitioned from very high power systems ( up to 25,000 watts peak) based on nearly 80 year old magnetron transmitter technology to low power solid state radars that might transmit a mere fraction of a watt.
Solid state systems offer Doppler speed measurement to detect relative motion between the radar and other vessels. Older magnetron systems are not sufficiently stable in operating frequency to permit Doppler detection. Older magnetron tube systems transmit exceptionally short pulses at very high power. But a receiver designed to collect those very short pulses must have a very wide bandwidth that includes competing noise. Solid state systems transmit far longer pulses that are typically encoded with linear frequency modulation called “chirp”. The combination of a long pulse that allows a narrow bandwidth receiver with far less noise results in greater detection range per watt of transmit power. The encoded frequency chirp achieves fine range resolution. Low power solid state systems can also use very short pulses for very fine resolution short range detection to a fraction of a mile.
Therefore newer solid state systems from Raymarine, Navico, Garmin and Furuno offer excellent performance in open array scanner systems and fine performance in small dome packages. These systems have virtually standardized on Ethernet digital data and simple 12 to 24vdc power.
With the advent of low power transmitters radiating less than 0.1% of the power of some older radars, the danger of suffering physical damage to eyes due to microwave heating has all but been eliminated.
Only the Navico Broadband Radar employs FMCW modulation and radiates less than a watt of power. This system enjoys favor with small boats where use is confined to 5 Nmi or less. In places like the San Juan Islands of Washington and the Gulf Islands of Canadian British Columbia that is more than sufficient for collision avoidance.
FMCW or Frequency Modulation Continuous Wave is a very powerful radar scheme when properly implemented. I have several patents related to this technology that includes new products currently in production as radar Altimeters and Millimeterwave Phased Array Radar.
A PDF presentation on recreational marine Radar will be added to this blog in the near future. The file includes more on radar modulation technology, installation advice, complimentary functionality with AIS and much more.
Contact us for consulting on marine Radar selection, site selection for optimal performance and comments on radar technology in general related to marine applications.
August in the San Juan Islands brings warm weather, light winds and opportunity for enjoying the best of boat types. Our style is a North Pacific 39 pilot house trawler. Speeds to 9.5 knots but cruise at 8 allows needing just an hour or two to reach most destinations and up to 4 hours for longer trips. Many enjoy high speed cruisers that run in the teens and near 20kts. But they can leave huge wakes and cause problems for shorelines and other boaters.
Anchorages are protected and beautiful in the San Juan’s. Plenty of room for lots of boats of every description. The beautiful area compliments some lovely boats as well.
In these COVID19 days people are friendly and mutually respectful wearing masks when gathered on trails or small stores for supplies.
Shaw Island General Store has a long history and is the center of traffic on and off the island with a Washington state ferry terminal adjacent to the store.
Local Dungeness crab is a delicacy alone or added to any meal. Crab is readily caught with traps and requires little cleaning before being prepared for dining.
Choosing the right anchorage is critical to a good night’s rest when winds in the nearby Strait of Juan de Fuca can reach 30 knots overnight usually WSW but can become southerly and spread among the islands. Steep chop spaced close together can challenge any boat design at rest or underway.
Having boated in the Pacific Northwest for over 30 years on 4 boats we owned and others we chartered has lead to an appreciation for many boat types and concerns about others.
Early mornings frequently are accompanied by ribbons of fog. As the sun rises it burns off and is replaced by warm sun and modest breezes.
Anchored in Parks Bay a research preserve on SW Shaw Island
The forecast is for rain and wind late tonight. So boats have gathered in Parks Bay to gain protection from expected strong Southerly and South westerly winds. The bay is open to the North but tall trees and rising hillside provide protection.
UW Research Dock
The south end of the bay shallows slowly after much of the bay is 45 feet deep. At the head of the bay a UW Research dock is graced by an older trawler that likely transports staff to and from nearby Friday Harbor where a large research facility is installed.
The head of the bay shallows to a more useful 20 to 25ft for anchoring.
High thin clouds and a steeply dropping barometer portends change is coming. In 72 hours the calm should return.
Sunset at Parks Bay
Sunset with gathering clouds was followed by a wonderful peaceful night with no wind in the bay despite a strong WSW wind blowing in the Strait of Juan de Fuca just a few miles south.
Early morning brought steady cool rain that ended just before departure at 9 AM for Island Marine Center in Fishermen’s Bay just 7 Nmi to the SE.
Our trip to Fisherman’s Bay on Lopez Island with a squall arriving was complicated by shoal draft of barely 5 ft at low tide in the serpentine entrance channel to the bay. Clearly we needed to plan for tide and wind conditions when choosing a departure time. We consulted our subscription to PredictWind weather service to note that winds would be lighter before 10 AM and that tides provided by Navionics charts confirmed a 10 AM arrival would be safest to navigate the entrance channel.
Entrance Channel
Planning was important because those 7 miles cross San Juan channel and are open to the wind from the adjacent Strait of Juan de Fuca.
Our planning proved accurate as winds were modest and depth in the approach channel was excellent. Shortly after our arrival winds increased dramatically and have been blowing well over 20 and gusting 28.
Wind in the harbor
Mostly clear blue skies accompanied the wind all day
Lopez Island looking West
Friday promises calm winds and a chance to explore nearby anchorages.
The term CFD is showing up more often these days in articles describing the design efforts used to make Volvo 60 round the world racers and America’s Cup yachts faster. Computational Fluid Dynamics or CFD actually covers a great many engineering specialties and is not the sole domain of boat and ship design. In this article we will review what types of CFD products exist and hopefully provide some understanding of when and how CFD products are best suited to a project.
Computational Fluid Dynamics is the application of computers to the modeling of fluid characteristics when either the fluid is in motion or when an object disturbs a fluid. A few examples of a fluid in motion are water or chemical flow in pipes, heating and ventilation systems conducting cooling, heating or fresh air supplies to a building. Fluids in motion also include flame and fire effects in combustion or jet engines. Surprised by these fields of interest?
What about examples of an object disturbing a fluid? Examples include stirring paddles submerged in a tank of water and effluent in a waste treatment plant, aircraft of all kinds, cars and trucks at highway or racing speeds and even monohull sailboats, ship, multihull sailboats to name but a few.
Obviously, an open mind is important when considering what constitutes a fluid. Fluids can exist in gaseous and liquid states and science has recently found that even some solids can exhibit fluid like characteristics under right conditions. Scientists have found that some of the most spectacular and deadly landslides or rock falls behave as a fluid while the mass of stone and soil or sand is in motion, only to return to a most decidedly solid form when the motion subsides.
The general field of fluid dynamics differs from the field of boat design in one critical way. Only boat design deals with a vehicle passing through the two fluids of air and water simultaneously.
Our atmosphere is a compressible fluid, though not at yachting or even high-powered boat racing speeds. Air can change in density according to altitude, temperature and humidity. Water is an incompressible fluid that can vary in viscosity according to its salinity and temperature.
For most of us, small effects such as variable salinity and temperature are not of concern, but can make the difference between winning and loosing a major international yacht race.
How do CFD programs Work?
CFD programs are based on the laws of physics, such as the law of conservation of momentum, and special “boundary conditions”. The law of conservation of momentum states that the total momentum of a system remains constant regardless of how the system may change. A boundary condition limits how and where a fluid can travel. A simple example is that motion of the fluid must remain tangent or parallel to the surface of an object passing through it. Another example is that pressure applied by the fluid against the object must be perpendicular to the surface at all points.
These laws and conditions are critical to the development of a CFD program because they allow an aerodynamicist to write equations that describe the system that is being studied. Without the physical laws and boundary conditions there would be no way to write equations that describe fluid motion. The complex equations that result take into account the viscosity, mass and other characteristics of the fluid. The equations are written using integral and differential calculus and require specialized computer techniques to solve them. Typically the programmer writes an algorithm that makes a series of estimates using algorithms that iteratively solve the sets of equations by looking for “balance” in the system of equations. A final answer is obtained when the algorithm converges on a solution with an error that is sufficiently small for the desired accuracy.
Once an algorithm has been developed to implement the laws of momentum and boundary conditions, it cannot be applied to the entire surface of the hull and appendages at once. The surface area of the hull, keel and rudder are broken into thousands of small patches (collectively called a mesh) and the algorithm applied to each patch. Each patch in turn influences the fluid flow on the patch area of its neighbors and therefore the solution must account for the conditions surrounding the patch currently being solved. As a result the program must solve and resolve the equations for all of the patches until the solution obeys the physical laws and boundary conditions.
Sometimes the complexities of the laws of physics are too difficult to implement all at the same time. As a result the aerodynamicists choose to write programs that make certain limiting assumptions that permit the programming to become more practical and still result in reasonable results. A specific example arises in the case of what actually happens to fluids very near the surface of an object. The boundary layer as it is called experiences shear forces in the objects direction of travel that result in viscous drag. These shear forces are described in a special set of equations called the Navier Stokes relationships. The Navier Stokes equations are sufficiently complex themselves that attempting to include them within every aerodynamics or hydrodynamics program would make the solutions nearly impossible. As a result there are Navier Stokes based programs that specifically address viscous drag and Panel method programs that compute lift, wave drag and induced drag. A complete estimate of the drag encountered by a boat requires the data supplied by both programs.
What do CFD programs Calculate?
The most obvious calculation that would be of interest in boat design is the determination of drag forces. But drag comes in several forms that can include, wave, viscous, and induced drag. Therefore, a designer must evaluate the effects of his design in each of these drag areas. The second general area of calculation is lift. The term lift arises from its application to aircraft and becomes a bit confusing when applied to the field of boat design. Lift applies to the forces generated by a keel or centerboard to resist the side force of sails and the driving force of the sails themselves. It also applies to the turning forces of a rudder, and the supportive force acting on “foils” to elevate a hydrofoil sail or powerboat above the water surface.
There is also a distinction between 2 and 3 dimensional fluid dynamics analysis. Specifically, there are programs that predict the performance of foils as if they existed on a wing of infinite length. Here the term “foil” is used to define the shape of a keel or rudder along the chord from the leading to the trailing edge. Foil shapes are best known by the alphanumerical names given to them such as NACA 63A012. So a 2D fluids program would compute the lift, drag, velocity distribution, turbulence onset and the generation of bubbles similar to cavitation for a 2D shape such as a wing or keel foil, and would not include any 3D information such as keel span or thickness distribution or the presence of a bulb. A 3D fluids program would compute wave and induced drag from a hull, keel and rudder, including the effects of a bulbed keel carrying winglets.
CFD codes are critical for more than optimizing the performance of a top-notch America’s Cup class racing yacht. These codes can be of great value to determine loads placed on boat structures of all types and are invaluable when applied to unique marine structures such as oil platforms that are frequently subjected to the world’s worst storms.
Lift and drag effects translate directly into loads that must be sustained by the boat or oil derrick if it is to remain intact in its intended operational conditions. For example, several years ago when the race was known as the Whitbread Round The World Race, many boats developed life threatening hull delamination when subjected to the continuous pounding of high speed downwind surfing and upwind beating. While delamination of a boat at sea is definitely related to structural design errors, those errors were caused by a lack of detailed information about the fluid forces experienced by the boats. Knowledge of these forces would have enabled designers to prevent the hull damage in the first place.
Therefore, the potential application of CFD to your design project should depend on whether or not the design regime that your vessel will operate in has well understood engineering data available to prevent hull damage in addition to overall performance of the vessel. For example, the last few years have seen the development of high-speed hydrofoil sailboats for the consumer market. These top performance boats experience not only significant speeds and loads, but the potential for unstable characteristics could make it highly dangerous to ride in one. However, the judicious use of field-testing and computer analysis has produced a crop of very exciting hydrofoil sport boats that are a joy to fly in.
Finally, several years ago a multihull sailboat arrived in port after participating in a trans-Atlantic race. When the centerboards were raised in the outer hulls of the trimaran, the skipper was
shocked to learn that the boards had been sheered off just below hull depth and he had not had their use for some indeterminate time during the later portion of the race. Clearly, the structural design of the boards had not taken into account the true forces of lift, drag or perhaps cavitation that would be experienced at sea.
CFD programs do not calculate how fast a boat of any type will pass through the water or predict the time to complete a course around the buoys. Predicting speed on a racecourse is the domain of another class of programs called Velocity Prediction Programs or VPP. The VPP makes use of lift and drag numbers calculated in a CFD program to estimate the speed about will sail a course given the sail drive forces and the stability or righting moment of the hull. The VPP is a closed loop simulation continuously varies estimated speed and resulting lift, drag and righting forces until retarding and driving forces are balanced and a stable speed results. A CFD program on the other hand is an open loop simulation that simply states that given an angle of heel and speed for a specified hull and appendage configuration, here are the forces that will result for that instant in time. No consideration is given to how the vessel achieved that speed or sailing condition.
In summary then, CFD programs not only calculate lift and drag forces of a hull with appendages, they can also be used to compute pressure loads due to waves and wave impact at speed. The forces of lift, drag and pressure can be translated into structural requirements and provide the means to optimize a hull working in concert with its appendages to produce lift in the most efficient manner possible while satisfying the needs for stability. Predictions of lift and drag at various speeds can be used to develop a mathematical model needed to accurately close the analysis loop of a velocity prediction program.
When is a CFD Computer Program Required?
CFD codes are not always required or justified however, when simpler means of estimating the forces involved are available. In the case of a typical sailboat design, the forces generated by the keel and rudder can be easily estimated if the keel lacks a bulb and if the keel and rudder shape are essentially straight leading and trailing edges. It is possible to make use of analytical methods that are easily implemented on personal computers. A simple example is the program I wrote called LOFT that makes use of analytical methods developed by NASA and the US Air Force for initial performance prediction of wing designs.
However, while simple programs like LOFT can adequately address typical bulb-less keels and rudders they cannot analyze the performance of an America’s Cup racing keel with bulb and winglets. Only 3D CFD programs can address that complex task.
Who can operate a CFD program?
While CFD programs can be of tremendous value, getting accurate and meaningful results is not typically within the reach of amateur and many professional boat designers. A degreed Naval Architect or a fluids dynamicist is required to generate the key initial input to a CFD program called a mesh.
The mesh is a mathematical description of the hull and appendages that are to be analyzed. It is not sufficient or even possible to use standard stations, waterlines and buttocks as inputs to a CFD program. The detailed shapes of the hull and appendages must be defined by a mesh of square
patches that adjoin one another and whose dimensions are chosen according to the local curvature of the hull or appendage or by the occurrence of the intersection of the hull and a keel, rudder or lifting strut of a hydrofoil. The generation of a mesh is a science unto itself and can require iterations by the analysts running successive trials to be sure that the mesh is sufficiently dense in critical areas. Some meshing can be done automatically and then refined by hand.
Typically the developers run complex 3D CFD programs or those trained in their use and as result are not really meant for use by the rest of us. However, 2D fluids programs designed for the analysis and development of 2D air or hydrofoil shapes (recall the 63A010 example) are sufficiently easy to use for a designer with basic mathematics skills and general knowledge of airfoil characteristics. Analytical programs such as Vacanti Yacht Design’s FOIL program can aero / hydrofoil lift, drag, turbulence onset and bubble formation characteristics for anyone with basic computer skills and a working knowledge of basic foil design.
What CFD Programs Exist?
Panel Method and Navier Stokes programs are two general classes of CFD programs that apply to the issues of boat design. The most commonly used and most available are Panel Method
programs. Panel methods allow the prediction of wave drag, free surface effects and induced drag due to lift generated by a keel or rudder but they do not account for viscous drag. Programs using panel methods assume that there are only forces normal to the surface of the hull within the fluid. However, due to viscosity, the fluid is subject to forces in shear – more or less parallel to the hull surface that causes turbulence. Therefore the panel programs are referred to as “inviscid” analysis methods. As a result they compute wave and induced drag but not the effects of viscous drag. Viscous drag computations are computed by specialized codes known as Navier Stokes programs. These programs are difficult to use and apply and are best left to a professional skilled in their use.
When a designer has a task that justifies the use of CFD programs, he should be using design tools that that can export true 3D surface shapes in the form of common Computer Aided Design (CAD) file formats. Designing in a typical CAD program such as AutoCAD using lines and polylines, even though in 3D are not sufficient for use with CFD programs. True surface definitions such as Non-Uniform Rational B-spline (NURB) surfaces are required. Most professional versions of the commonly known yacht design programs (AeroHydro, AutoShip, Maxsurf, New Wave, PROLINES) all provide this kind of file exchange.
Licensing costs or consulting time is available from the companies or sources listed below.
Company Name
Program(s)
Web Address
Specialized consulting companies include:
Bruce Rosen South Bay Simulations 44 Sumpwams Ave Babylon, NY 11702 631 587 3770, brosen@panix.com
Joe Laisoa Fluid Motion Analysis Consulting, Inc. 3062 Queensberry Dr. Huntingtown, MD 20639, 410 535 0307 X3351, laiosa@panix.com
Conclusion
CFD programs are best applied when there are either significant engineering unknown effects or load levels or where design optimization for a specific application in specific conditions are essential to the goal. For instance, there are many books of scantlings or building standards for typical sailboat or powerboat designs intended for inland cruising. But an attempt at the world record speed sailing at the “ditch” in France at speeds approaching 50 knots clearly calls for specialized analysis to prevent catastrophic failure that could risk lives or incur that last bit of drag that could prevent success in inching the speed record that much higher.
Some CFD codes are only usable in the hands of a skilled practioner and others are designed and intended for use by those with reasonable technical skills and willingness to do a bit of reading or research to help them understand the results and limitations of their modeling efforts. CFD and
analytical programs are very important to the development of high performance vessels from the perspective of optimization for speed and safety. High speed sailing craft and those destined for offshore use can benefit the most from computer analysis methods. One final key point here is that we have only discussed vessels in displacement mode and have not referred to high performance planning powerboats. The prediction of planning vessel performance is an art unto itself and is the domain of yet another class of programs. I refer those of you who wish to know more about that subject area to research the Society of Naval Architects and Marine Engineers (http://www.sname.org) web site.





































You must be logged in to post a comment.